
If there’s one topic that gets a lot of attention lately in the media, the public policy sphere, and in general health and wellness discussions, it is how to make the roadways safer According to the Centers for Disease Control, fatalities from traffic incidents happen on an annual basis upwards of 33,000 people. Many of these accidents are preventable, and an alarming number of them are a result of distracted driving.

Why Self-Driving Cars?
Safety
Convenience
Efficiency
Affordability
* Software Simulation
1 - Finding Lane Lines
2 - Advanced Lane Finding

3 - Behavioral Cloning

4 - Vehicle Detection
Project
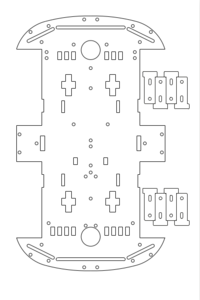
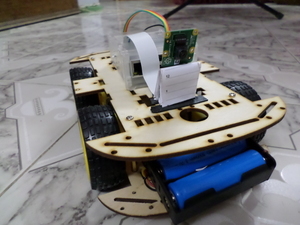
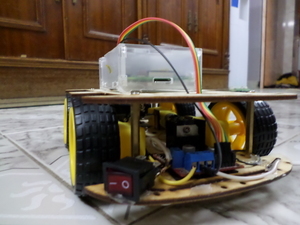
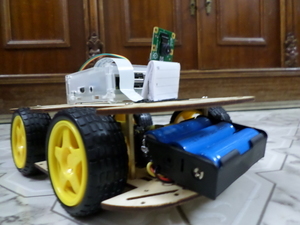
Step 1: Components We Need
- RC Car Chassis
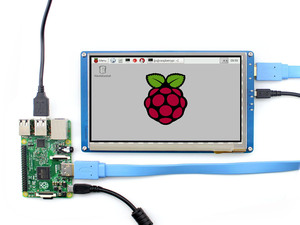
- Raspberry Pi 3 Board
- Raspberry Pi 3 Case (optional)
- Heat Sinks x 2
- Micro SDHC Card
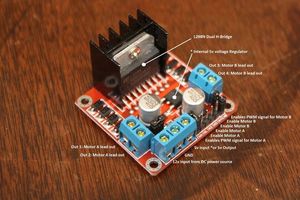
- L298N Motor Driver
- Battery Pack
- Jumper Wires x 16
- HDMI Cable (optional)
- HDMI Monitor (optional)
- Resistors
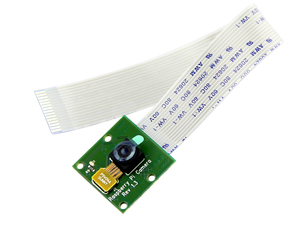
- Pi Camera Module






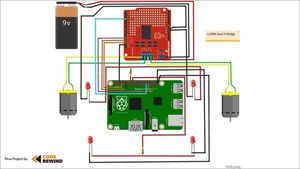
Step 2: Connecting






Step 3: Wiring Pi and Components
Step 4: Software Required
- Raspbian Wheezy (This is the Linux OS flavor)
- TensorFlow
- OpenCV
- RPi.GPIO (control GPIO)
- Remot3.it (For controlling the device from anywhere)
- Socket.io
- Express.js (nodejs For developing web apps)
Step 5: Installing dependencies from PiP
install opencv
sudo add-apt-repository ppa:orangain/opencv
sudo apt-get update
sudo apt-get install python-opencv
install tensorflow
sudo apt-get update
sudo apt-get install python-pip python-dev
wget https://github.com/samjabrahams/tensorflow-on-raspberry-pi/releases/download/v0.12.1/tensorflow-0.12.1-cp27-none-linux_armv7l.whl
sudo pip install tensorflow-0.12.1-cp27-none-linux_armv7l.whl
sudo pip install mock
sudo pip2 install tensorflow-0.12.1-cp27-none-linux_armv7l.whl
install the python RPi.GPIO library
sudo apt-get install python-rpi.gpio
instal nodejs
sudo apt-get install nodejs
sudo apt-get install npm
install socket.io
npm install socket.io express johnny-five
install remot3.it
sudo apt-get install weavedconnectd
var args = process.argv.slice(2);
var express = require('express');
var app = express();
var http = require('http').Server(app);
var io = require('socket.io')(http);
var bodyParser = require('body-parser');
app.use(bodyParser.json());
if (args.indexOf("noArduino") == -1) {
var five = require("johnny-five")
, board, servo;
var arduinoServos = {};
var throttleTimeout;
var accelerationServo = {
pin: 9,
range: [0, 180],
type: "standard",
startAt: 90,
center: false
};
var steeringServo = {
pin: 10,
range: [40, 100],
type: "standard",
startAt: 75,
center: true,
};
}
stringValues = {
//throttle
'forward': 65,
'reverse': 105,
'stop': 90,
'throttleTime': 500,
//steering
'left': 40,
'right': 100,
'neutral': 75,
};
serverStatus = {
hasArduino: false,
hasCamera: false,
currentAI: 'none',
};
// Start server
http.listen(80, function(){
console.log('Starting server, listening on *:80');
});
app.use(express.static(__dirname + '/public'));
app.get('/', function (req, res) {
res.sendfile(__dirname + '/index.html');
});
// allow commands to be send via http call - GET only accepts command
app.get('/command/', function (req, res) {
processRobotCommand (req.query.command);
res.send('command: ' + req.query.command);
// Eventually replace with json so commands can be sent back
res.json({ 'state': serverStatus.currentAI });
});
// POST can look for timestamp(ms), command, and status
app.post('/command/', function (req, res) {
processRobotCommand (req.body.command);
updateRobotStatus (req.body.status);
});
io.on('connection', function (socket) {
console.log('A user has connected ');
socket.emit('robot status', { data: 'server connected' });
// Robot commands
socket.on('robot command', function (data) {
processRobotCommand (data.data);
});
// Status update - gets forwarded to the webpage
socket.on('robot update', function (data) {
var updatedData = data.data;
updateRobotStatus (updatedData);
});
});
// Interprets and acts on a given command (expects strings split by "-")
function processRobotCommand (command) {
var parsedCommand = command.split("-");
console.log('----- Command: -----');
console.log(parsedCommand);
if (serverStatus.hasArduino) {
// commands to johnny five
// A bit convoluted here: commands are split between '-', with an arbitrary order for each section
if (parsedCommand[0] == 'manual') {
if (parsedCommand[1] == 'throttle') {
if (parsedCommand.length < 4) {
parsedCommand[3] = stringValues['throttleTime'];
}
if (parsedCommand[2] in stringValues) {
accelChange(stringValues[parsedCommand[2]], parsedCommand[3]);
}
else {
accelChange(parseInt(parsedCommand[2]), parsedCommand[3]);
}
}
else if (parsedCommand[1] == 'turn') {
if (parsedCommand[2] in stringValues) {
steerChange(stringValues[parsedCommand[2]]);
}
else {
steerChange(parseInt(parsedCommand[2]));
}
}
}
// AI commands - to be forwarded to opencv
else if (parsedCommand[0] == 'face') {
console.log('facing');
if (parsedCommand[1] == 'begin') {
serverStatus.currentAI = 'face';
}
else {
serverStatus.currentAI = 'none';
}
}
else if (parsedCommand[0] == 'red') {
if (parsedCommand[1] == 'begin') {
serverStatus.currentAI = 'red';
}
else {
serverStatus.currentAI = 'none';
}
}
else { // parsedCommand[0] = 'stop'
steerChange(stringValues['neutral']);
accelChange(stringValues['stop']);
}
}
}
// Broadcasts an update to the robot status
function updateRobotStatus (updatedData) {
updatedData['Time'] = new Date();
updatedData['Arduino Attached'] = serverStatus.hasArduino;
socket.broadcast.emit('robot status', { 'data': updatedData });
}
// ----- Johnny Five -----
// These should only be called or accessed if "noArduino" is not an option
function steerChange (value) {
arduinoServos.steering.to(value);
board.repl.inject({
s: arduinoServos
});
}
function accelChange (value, accelFor) {
// Throttle has an automatic timeout so car doesn't run into things
if (accelFor) {
if (throttleTimeout) {
clearTimeout(throttleTimeout);
}
throttleTimeout = setTimeout(function(){accelChange(stringValues['stop'])}, accelFor);
}
arduinoServos.acceleration.to(value);
board.repl.inject({
s: arduinoServos
});
}
if (args.indexOf("noArduino") == -1) {
board = new five.Board();
board.on("ready", function() {
arduinoServos = {
acceleration: new five.Servo(accelerationServo),
steering: new five.Servo(steeringServo)
};
acceleration = arduinoServos.acceleration;
steering = arduinoServos.steering;
// Inject the `servo` hardware into
// the Repl instance's context;
// allows direct command line access
board.repl.inject({
s: arduinoServos
});
serverStatus.hasArduino = true;
});
}
whole project is on this Github repo

Comments